Datasets > Symphony Lake Dataset - Image Pair Dataset
Symphony Lake Dataset 2014 consists of 121 visual surveys of a lakeshore over more than three years in Metz, France. Unique from roadway datasets, it adds breadth to a space at a time when larger and more diverse datasets are needed to train data hungry machine learning methods. Over 5 million images from an unmanned surface vehicle capture the unstructured, natural environment as it evolved over time. Significant variation in appearance is present on time scales of weeks, seasons, and years. Success in this space may demonstrate advancements in perception, SLAM, and environment monitoring.
The data presented in this page build on our localisation results. Knowing the boat poses with a reasonnable precision, it is possible to create pairs of images taken from approximately the same pose and thus observing the same part of the lake shore at different seasons.
The orientation of the poses can also be used to create an artificially rotated image that simulate an image pair with parallel view points.
The alignment effect can be better appreciated with a flickering display:
The dataset includes 16 archives of 1000 image pairs each plus a CSV file giving image source in the dataset and the absolute estimated pose for each image. Each pair is provided as raw images as well as a rotation compensated pair in the subfolder “warp”.
– index: numerical index of the image. The line k, refers to the image pair “%06d_1.jpg”, “%06d_2.jpg” (using C formatting notations), as well as “warp/%06d_warp_1.jpg” and “warp/%06d_warp_2.jpg”.
– survey_i: date/folder name of the survey this image belongs to
– seq_i: sequence number of the image in the survey.
– x_i, y_i: absolute position of the camera at acquisition time.
– theta_i: camera viewing direction in radians.
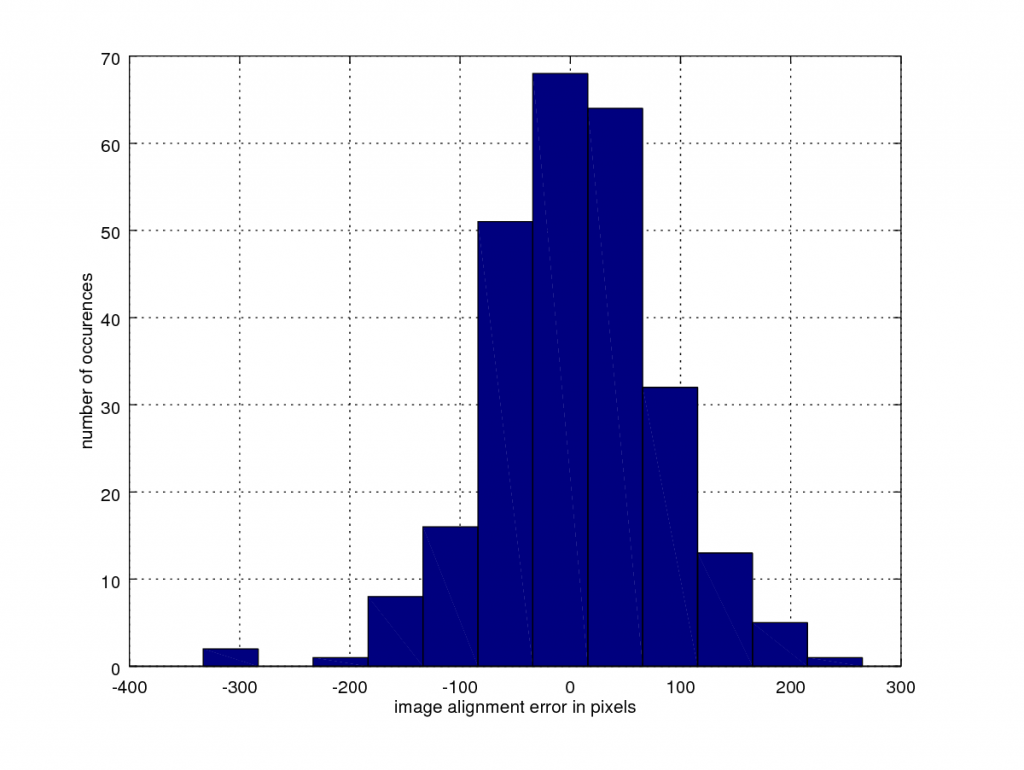
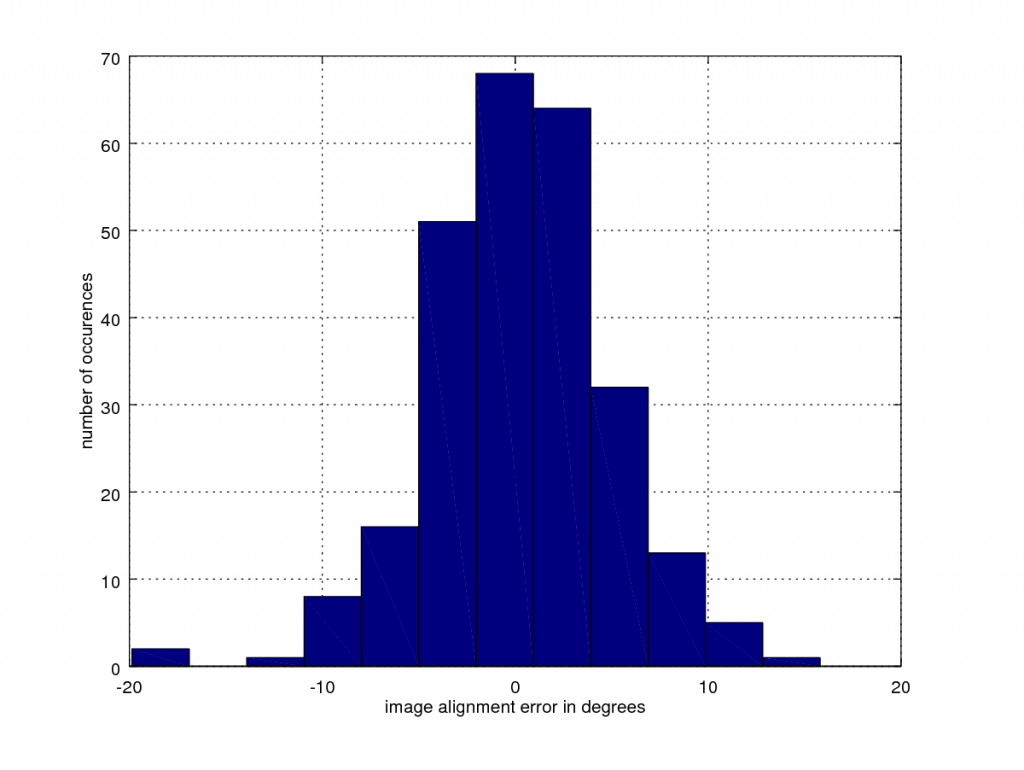
Alignment precision:
The precision of the alignment of the rotation compensated image pairs was evaluated by hand-labelling 265 pairs. In each pair, a single point was marked corresponding to the same physical object. The horizontal offset in pixels gives an estimate of the alignment error. This error in pixel can be converted to degrees using the camera internal parameters (42 degrees opening angle for 704 pixels). The resulting error distribution is given below. The mean and median error are below 1 degree, standard deviation below 5 and 90% of the image pairs have less than 8 degrees of misalignment.
Following the same principle as the selection of image pairs, it is possible to build time lapses of the evolution of the appearance of a given location through the 4 years of the dataset:
To complement the dataset of image pairs, we provide below a dataset of timelapses in which for 100 reference images, we select the corresponding view in all the other surveys for which a sufficiently close pose exists (less than 5m of distance along the optical axis, less than 30 degrees of misalignment). The 5 archives below (approx. 500MB each) contain each 20 timelapses. Each timelapse is made of one folder with the reference image, and two sub-folders: one with the raw images from the timelapse and one with the rotation compensated images. Additionally, a CSV file named “image_all_pairs.csv” provides for each reference image, the sequence number of the corresponding view in the 130 other surveys. This information is also encoded in the image file names “<survey data>_<seq number>.jpg”.
@inproceedings{pradalierPairs, title={Multi-session lake-shore monitoring in visually challenging conditions}, author={Cédric Pradalier and Stéphanie Aravecchia and François Pomerleau}, booktitle={International Conference on Field and Service Robotics}, year={2019} }
Alternatively, the generic dataset paper may also be relevant:
@article{griffithDataset, title={Symphony Lake Dataset}, author={Shane Griffith and Georges Chahine and C{\'e}dric Pradalier}, journal={International Journal of Robotics Research}, volume={36}, pages={1151-1158}, year={2017}, publisher={SAGE Publications} }