| Sensors | Intrinsics (pinhole) | Extrinsics (extrinsics) |
|---|---|---|
| Camera 1 Model: FL3-U3-20E4C-C FoV: 102° x 82° |
W: 1600 H: 1200 FX=772.0846, FY=773.5985, CX=766.31413, CY=597.03187 D=[-0.20510379301, 0.08491934467, -0.00119285038, 0.000154900, -0.0167629201] |
Q=[-0.70710678, 0.70710678, 0], 0 T=[0.15342, -0.0587, -0.04233] |
| Camera 2 Model: FL3-U3-20E4C-C FoV: 102° x 82° |
W: 1600 H: 1200 FX=775.6484, FY=776.01552, CX=745.573795, CY=597.230424 D=[-0.2039988277, 0.085687646607, -0.00019175875, -9.68752e-05, -0.0157322399] |
Q=[0.70710678, 0, 0], 0.70710678 T=[0.03, -0.349622, -0.01455] |
| Camera 3 Model: FL3-U3-20E4C-C FoV: 102° x 82° |
W: 1600 H: 1200 FX=774.2771, FY=774.4499, CX=783.93828, CY=574.1349763 D=[-0.2001681531, 0.076846362477, -0.00059278558, -0.000581592, -0.0137803622] |
Q=[0, 0.70710678, 0.70710678], 0 T=[0.03, 0.230462, -0.01455] |
| INS (base_link) Model: VectorNAV VN-200 Rugged |
N/A | Q=[0, 0, 0], 1 T=[0, 0, 0] |
| Lidar Model: RS-bPearl 360° x 90° |
N/A | Q=[1, 0, 0], 0 T=[0.01848, -0.05937, -0.113] |
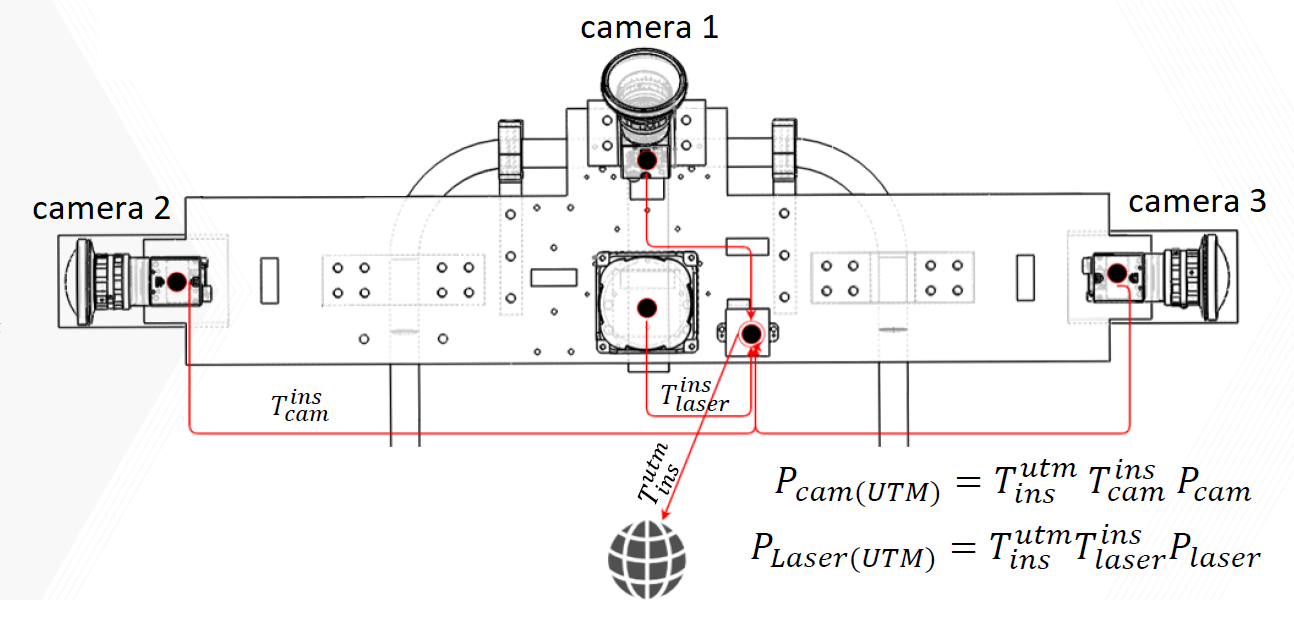
Tip/example on using the extrinsics:
- A point P_cam {Px, Py, Pz, 1} in the camera 1 frame can be brought into the INS frame using: P_ins = T1 * P_cam where T1 is a 4x4 rigid body transform that represents the above extrinsics for camera 1, and * is a matrice multiplication operator.
| Date | Camera 1 | Camera 1 -Downsampled | Camera 2 | Camera 2 - Downsampeld | Camera 3 | Camera 3 - Downsampled | Lidar | Metrics (RTK GPS+ INS) |
|---|---|---|---|---|---|---|---|---|
| August 2020 | 8.3G | 424M | 5.5G | 280M | 6.5G | 330M | 2.0G | 2.2M |
| September 2020 | 8.7G | 441M | 11G | 539M | 13.0G | 621M | 1.9G | 3.6M |
| October 2020 | 9.5G | 483M | 12G | 609M | 14.0G | 679M | 2.3G | 4.2M |
| November 2020 | 9.3G | 476M | 14G | 678M | 15.0G | 766M | 1.9G | 3.8M |
| December 2020 | 6.5G | 330M | 8.8G | 450M | 9.8G | 500M | 1.9G | 3.8M |
| January 2021 | 11G | 531M | 12G | 589M | 13G | 616M | 1.9G | 4.1M |
| February 2021 | 11G | 515M | 12G | 569M | 14G | 692M | 2.0G | 4.2M |
| March 2021 | 6.6G | 335M | 9.9G | 508M | 9.9G | 508M | 2.0G | 3.8M |
| April 2021 | 9.6G | 492M | 13G | 629M | 14G | 671M | 1.8G | 3.8M |
| May 2021 | 8.5G | 434M | 12G | 609M | 13G | 635M | 2.3G | 4.2M |
| June 2021 | 9.2G | 467M | 12G | 594M | 13G | 654M | 2.3G | 4.1M |
| July 2021 | 9.2G | 470M | 13G | 620M | 13G | 650M | 2.4G | 4.2M |
| Date | Camera 1 | Camera 1 -Downsampled | Camera 2 | Camera 2 - Downsampeld | Camera 3 | Camera 3 - Downsampled | Lidar | Metrics (RTK GPS+ INS) |
|---|---|---|---|---|---|---|---|---|
| August 2020 | 4.0G | 202M | 4.2G | 214M | 5.2G | 263M | 1.1G | 1.7M |
| November 2020 | 5.5 | 281M | 5.7G | 290M | 7.2G | 368M | 1.5G | 2.7M |
| December 2020 | 2.6G | 130M | 3.4G | 171M | 3.4G | 171M | 856M | 1.4M |
| March 2021 | 2.3G | 118M | 2.4G | 120M | 2.6G | 133M | 625M | 1.2M |
| June 2021 | 2.1G | 106M | 2.4G | 119M | 2.9G | 146M | 731M | 1.2M |
If you use this dataset, please cite the following two papers:
Chahine G., Pradalier C., The backpack dataset....
@article{Chahine_2022_FR,
author = {Chahine, Georges and Pradalier, Cedric},
title = {Semantic-aware spatio-temporal Alignment of Natural Outdoor Surveys},
volume= {2},
journal= {Field Robotics},
year = {2022},
pages= {1819-1848} }
If you use semantic lidar data, please also cite the following paper:
@InProceedings{Larsson_2019_CVPR,
author = {Larsson, Mans and Stenborg, Erik and Hammarstrand, Lars and Pollefeys, Marc and Sattler, Torsten and Kahl, Fredrik},
title = {A Cross-Season Correspondence Dataset for Robust Semantic Segmentation},
booktitle = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2019}
}
created with
Website Builder Software .