Symphony Lake Dataset - 2D Localisation and Mapping Data
The Symphony Lake Dataset consists of 121 visual surveys of a lakeshore over more than three years in Metz, France. Unique from roadway datasets, it adds breadth to a space at a time when larger and more diverse datasets are needed to train data hungry machine learning methods. Over 5 million images from an unmanned surface vehicle capture the unstructured, natural environment as it evolved over time. Significant variation in appearance is present on time scales of weeks, seasons, and years. Success in this space may demonstrate advancements in perception, SLAM, and environment monitoring.
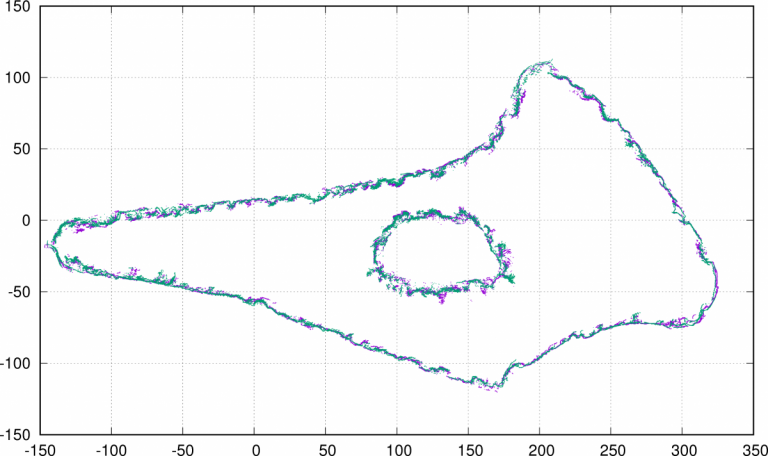
The data presented in this page includes the results of our 2D multi-session SLAM research using the 2D LIDAR data combined with ICP
from LibPointMatcher.
The archive below includes three types of data: the map point clouds in a CSV format compatible with LibPointMatcher, the boat trajectories and a PNG image for each survey, similar to the one below.
Download links:
- Archive of all maps and trajectories (approx. 500MB).
- Index PDF with all maps in a single document (43MB)
- Git Repository to jointly access the image directories and the corresponding poses. Check the load_survey.cpp source.
File Structure:
The map files are CSV files with the following header:
x,y,nx,ny,observationDirections0,observationDirections1,intensity,stamps_Msec,stamps_sec,stamps_nsec,simpleSensorNoise,probabilityStatic,probabilityDynamic,dynamic_ratio,densities
- x,y: the point coordinates
- nx,ny: the point normals
- observationDirection0,observationDirection1: the vector to the sensor origin when measuring this point
- intensity: returned light intensity
- stamps_Msecs,stamps_sec,stamps_nsec: time stamp such that t = Msecs * 1e6 + sec + nsec * 1e9 is the time since the epoch in seconds.
- simpleSensorNoise: estimated noise
- probabilityStatic,probabilityDynamic,dynamic_ratio: estimated nature of the point. In our maps, most points are considered dynamic with a likelihood > 1e9.
- densitiies: estimated density.
The pose files are CSV files with the following header:
kf,t,x,y,theta,xg,yg,thetag
- kf: index of the keyframe in which this pose was estimated
- t: timestamp, in second
- x,y,theta: coordinate (SE2) in the local keyframe, in meter/rad
- xg,yg,thetag: coordinate in a globally consistent frame, in meter/rad.