Robotics
R3AMA: Robust Reinforcement Learning for floating waste collection
This ANR project aims to train robust RL agent for real-world applications, such as floating waste collection with an USV

Muscaa: Learning dynamic parameters from exteroceptive sensors
This ANR project focuses on learning to predict driving conditions from exteroceptive data only.

AiGreenBots
AIGreenBots is a Doctoral Network (DN) that aims to provide advanced training and real-life experience for Researchers who will cope with the next-generation of agricultural robotics.
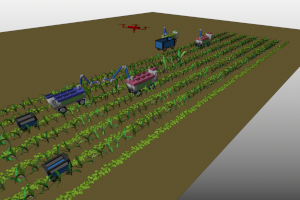
Ninsar: New Itineraries for Agroecology using Cooperative Robots
In this PEPR project, we build a framework for online multi-layer map with 3D-geometry and semantic data, from an heterogeneous fleet of robots.

Autonomous Exploration in Natural Environments
This project focuses on the specific challenges raised when exploring natural environments
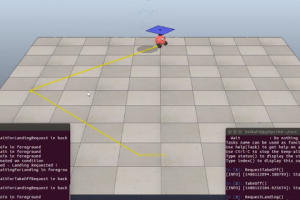
ROS Task Manager
The Task Manager offers a framework to simplify the implementation of complex robotic missions

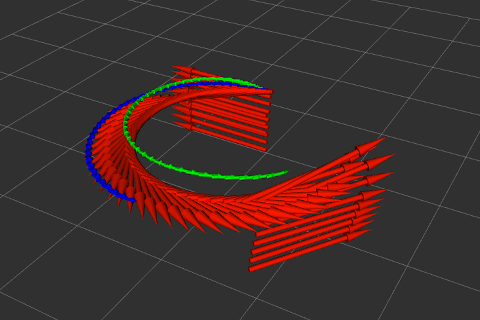
Autonomous boat navigation with model-based Reinforcement Learning
This project proposes several methods to improve flexibility and robustness of world models
Industrial Inspection

BugWright2
[Completed in March 2024] Autonomous Robotic Inspection and Maintenance on Ship Hulls and Storage Tanks. The CNRS - IRL2958 coordinated this Horizon 2020, 21 partners project from 2020 to 2024

WoodSeer
Predicting Inner Wood Defects from Outer Bark Features. Coordinated by INRA, this ANR project ran from the end of 2019 to 2024.
Ultrasonic Guided Waves
This project aims at developing software for the detection of defects in metal-plate structures using guided waves, opto-acoustics and machine learning.
HullScanner
This project aims at developing technologies to support the underwater inspection of ship hulls.
Environment Monitoring

Smart-Biodiv : AI for Biodiversity Research
The aim of this ANR project is to develop Artificial Intelligence tools to monitor biodiversity in marine ecosystems
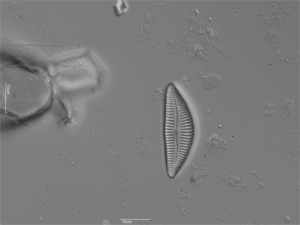
Diatoms Detection and Classification
This project aims at performing automatic detection and classification of diatoms to monitor water quality

Long-term River Monitoring
The objective of the project will be to build tools to monitor, document and quantify the evolution of small rivers after large strutural work (dam removal, re-creation of meanders)

Lake-shore Monitoring
The goal of this project is to monitor the shore of the Lake Symphonie in Metz, France with high-frequency over a significant time scale, using our Kingfisher platform. From this dataset, it will be possible to build an history of geo-referenced change
Computational Perception

Toad Monitoring
The goal of this project is to deploy trained image processing models to detect toads, frogs, newts or salamanders from wild-life monitoring video streams

Spoonbill Monitoring
This project developped a bird-tag detector and reader for automated bird monitoring systems
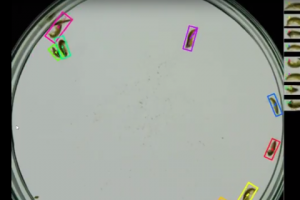
Gammarus Tracking
The goal of this project is to implement an image-based tracking of gammarus within a Petri dish, with the intent to quantitatively assess the water quality based on their vitality
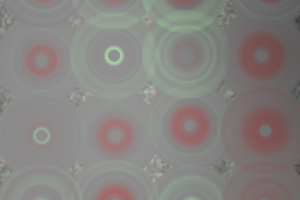
Luminescence Images for Antibiotic Sifting
This project aims at studying the effect of antibiotics on the diffusion of antibio-resistance genes. This is achieved by analyzing bio-luminescence images captured by an highly sensitive CCD camera
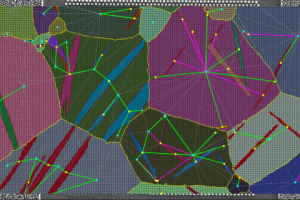
Electron Back Scatter Diffractometry Images
EBSD Images are images where every pixel can be seen as a quaternion representing the orientation of a crystal mesh.
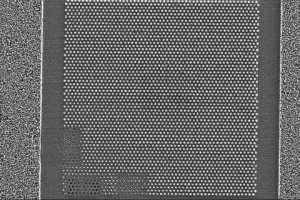
Electron-Beam Microscope Images
Electron-Beam microscopes are used to image very small objects, of the order of 100s of nanometers. This page reports on some experiment on the automated analysis of images of grown semi-conductors.
Archived Projects
Machine Learning for Predictive Control
Developing aerial robotic in the Greater Region is the focus of the GRoNe project (http://interreg-grone.eu). As part of this initiative we intend to improve autonomous drone navigation by combining machine learning and model predictive control.
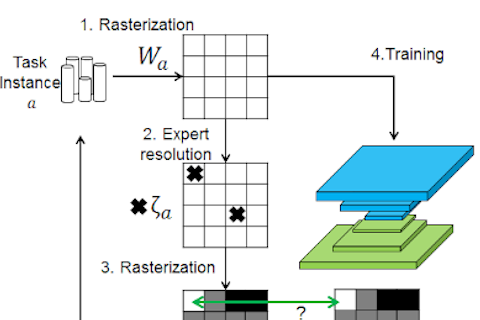
Focused Inspection
Focused Inspection using Imitation Learning. This project aims at learning the utility function that drives a human expert during an inspection task.
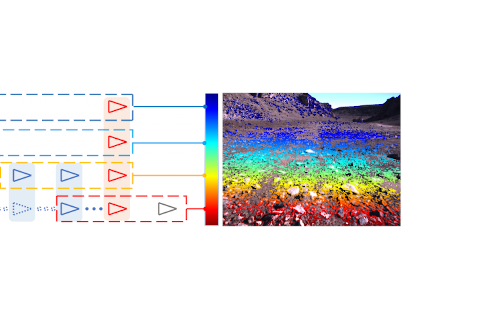
Visual Reconstruction and Localisation in Natural Environment
Visual navigation in a natural environment raises considerable challenges when relying on vision due to the poor distinctivity of features. This page relates our work on visual slam for these specific environments.

Flourish: Robotics for Precision Agriculture
Flourish is a European Project coordinated by the Autonomous Systems Lab at ETH Zürich (Switzerland) with a focus on aerial and ground robotics for precision farming.

OrcaDepred
This ANR project is focused on the issue of depredation of long lines in the fishing industry by sperm whales and killer whales.
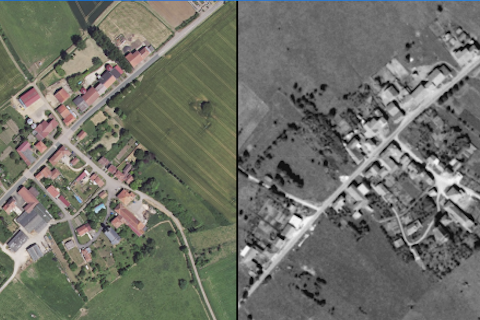
Land-Use Classification from Overhead Imagery
This project is a collaboration with AgroParisTech, using segmentation of overhead imagery with deep learning to classify land use at a very fine-grained scale.