HullScanner - Underwater Inspection of Ship Hulls
The HullScanner project is a follow-up project of the BugWright2 project, funded by the french agency for defense innovation (AID). It is led by SME Roboplanet and involves Testia and our team. The objective is to develop technologies that would facilitate the ultrasonic inspection of ship hulls without requiring to bring a vessel in dry dock.
Our contributions:
- Development of a navigation system for a magnetic crawler, fusing odometry, pressure sensor, IMU and possibly inspection data.
- Evaluation of the potential of visual odometry as an alternative localisation for the magnetic crawler.
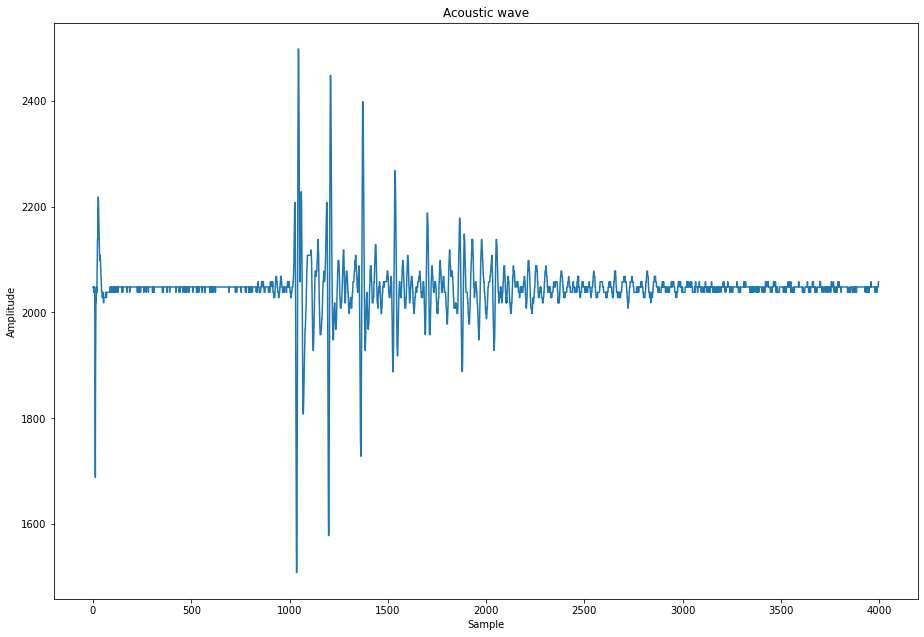
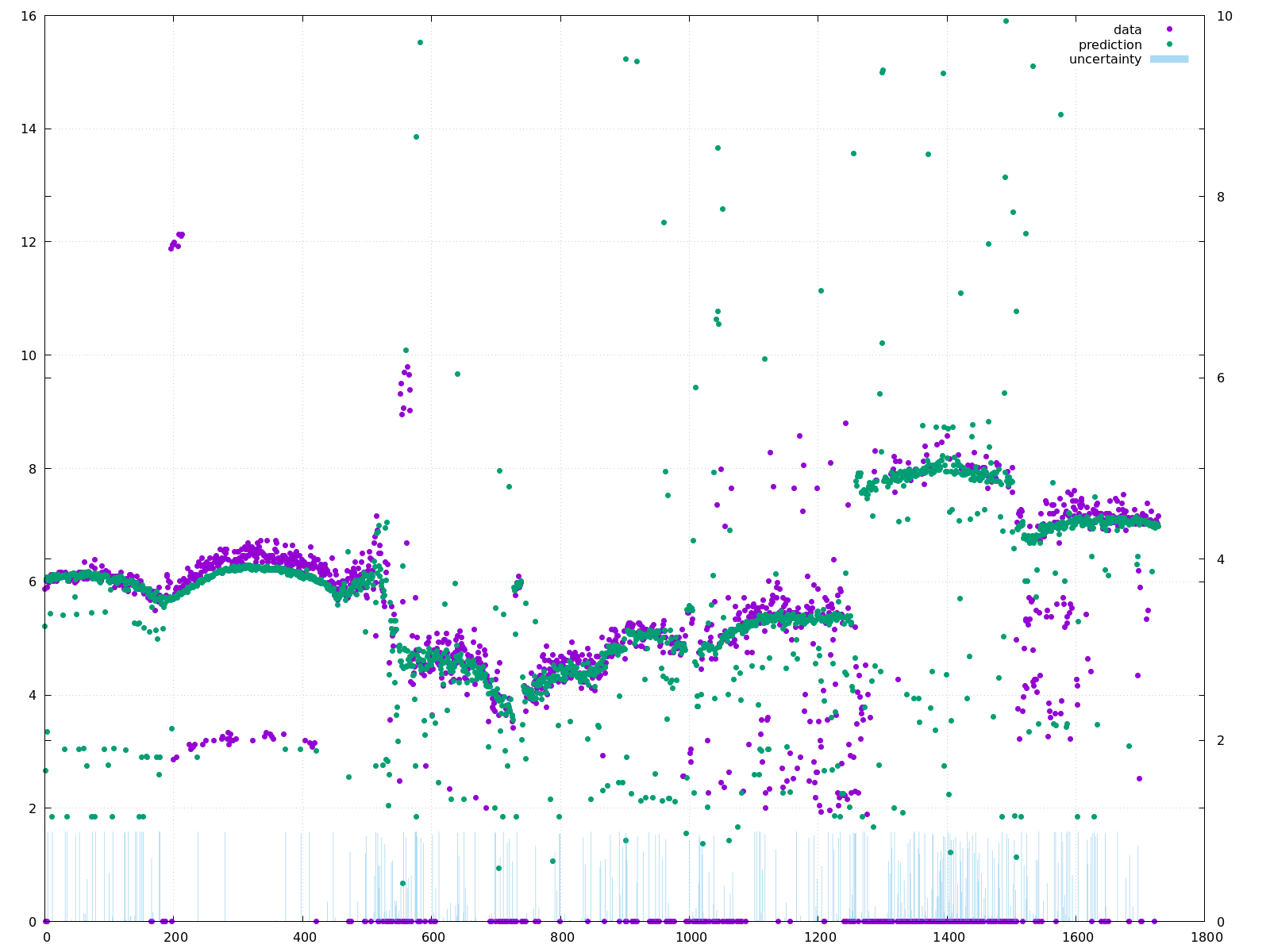
- Use of machine learning to interprete thickness measurement data and identify places where the measurement is not reliable.