Muscaa - Learning dynamic parameters from exteroceptive sensors

The objective of the ANR MUSCAA project is to propose predictive mechanisms for adapting the behavior of a mobile robot evolving in agricultural environments in order to guarantee its integrity and the efficiency of the task at hand. To do this, it is proposed to investigate deep learning techniques and enriched mapping processes in order to associate observation algorithms with the perception of the environment. The developments expected in the project will aim in particular at linking parameters governing the dynamics of the robot (motricity, adhesion, vibration, action of a tool on the ground…), which we can be observed but not predicted, with high-level perception elements (image texture, laser intensity, radar…), so as to anticipate a variation of the robot’s behavior. The main developments proposed by this project to improve the behavior of agricultural robots are:
- Recognition of different soil types and their influence on robot behavior, using machine learning;
- The online selection of perception and control modes;
- The adaptation of the parameters of the considered control laws;
- The design and use of an advanced and enriched real-time cartography that can be shared by several types of robots as well as manually controlled vehicles.
The development of such an approach requires exteroceptive perception systems capable of providing information influencing the robot’s dynamics, as well as perceiving the environment at a sufficiently distant horizon to allow an anticipation of the behavior. This constitutes a first scientific challenge, potentially requiring the combination of multiple perception technologies. The second challenge consists in developing learning algorithms capable of correlating sensor data with observed variables of the control laws.
To give a robot this anticipation capability, motion control will first rely on a map of its environment, built during previous runs and enriched in real time with current, measured and estimated data. The data of this map will be matched with information on the context (meteorological data in particular), making it possible to anticipate a variation of the evolution conditions during the robot work. This seems natural for a driver (adapting his driving in cold and wet weather to prevent a risk of black ice), but remains difficult for a robot. Indeed, this requires an aggregation of heterogeneous data from different sources (embedded sensors, web and contextual data…) whose exploitation remains an exploratory field in robotics.
Finally, the last issue of the project concerns the mechanism of behavioral adaptation of the robot. Indeed, the real time modification of the control parameters, or more abruptly the online change of control types, is not immediate. It is necessary to implement a real-time supervision approach that will not only optimize the robot’s behavior, but also guarantee the stability and accuracy of the control despite variations and transitions in the control structure.
Identification of soil types and terrain geometry
Work by Tom Bourbon
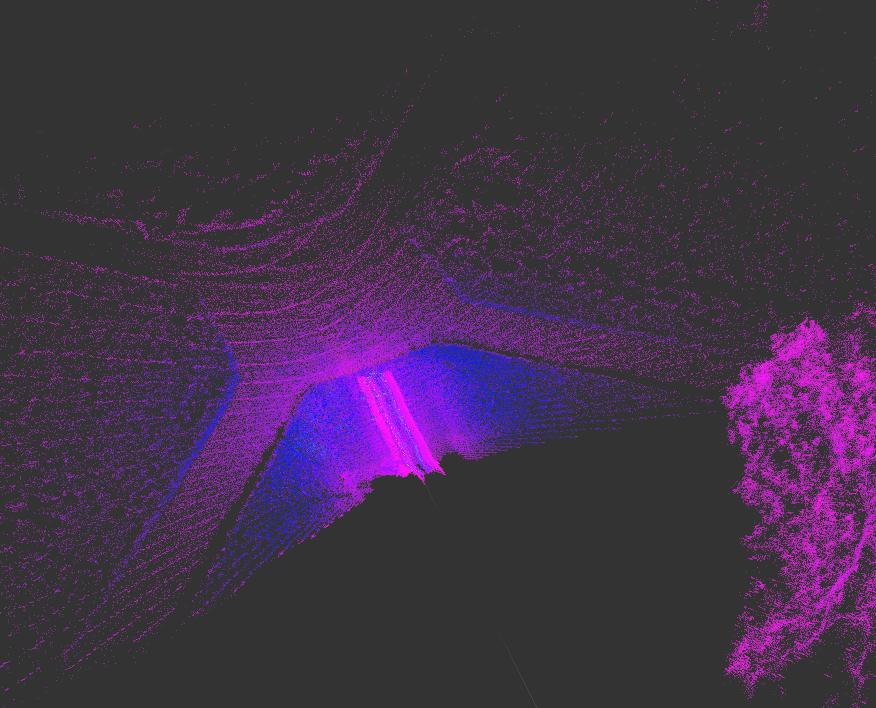
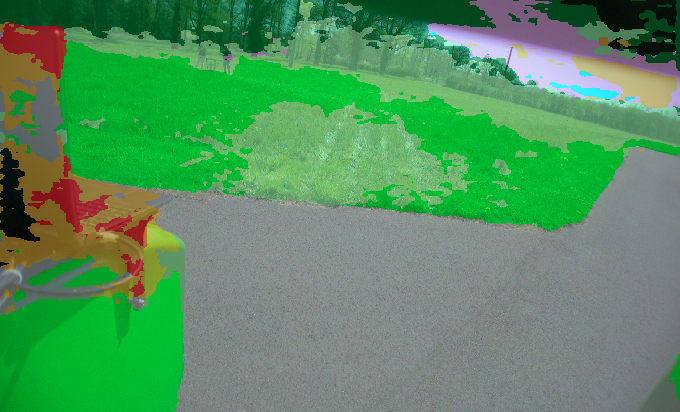
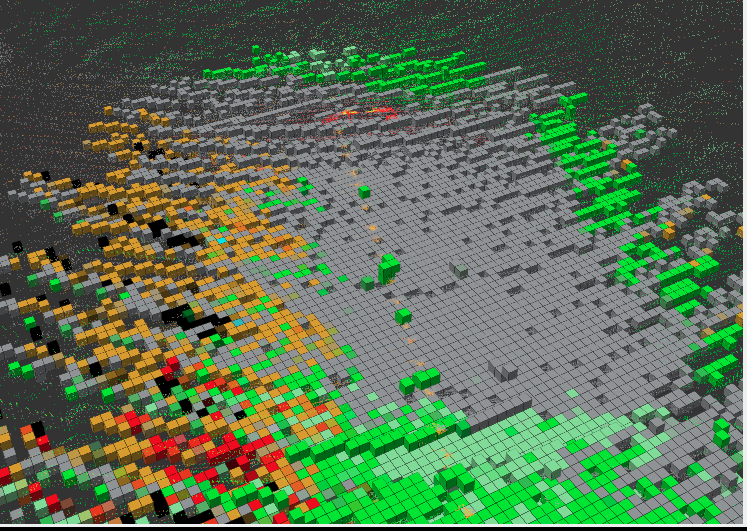
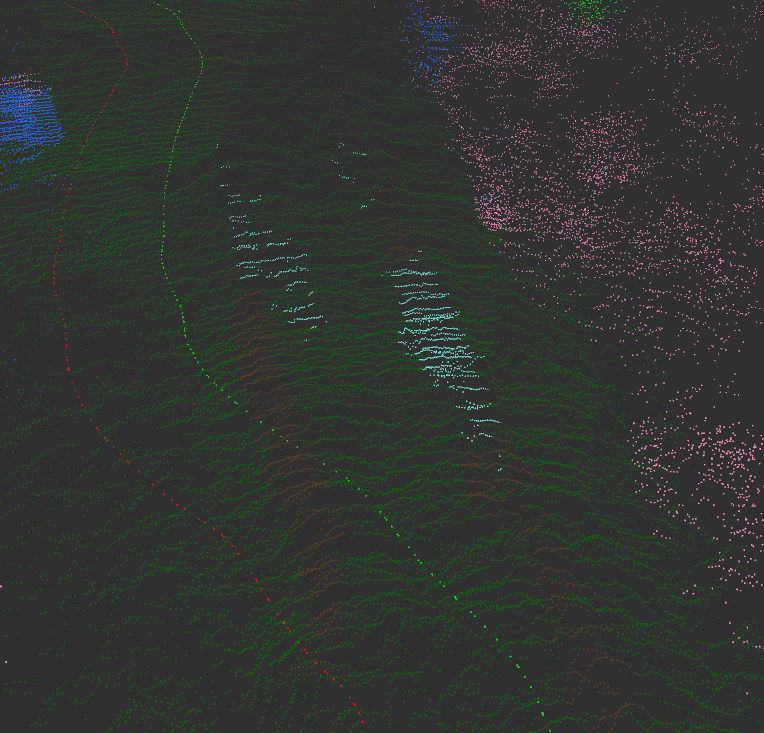
The first approach is to perform a semtantic segmentation of the terrain. Images captured by a FLIR camera fitted with a wide-angle lensc are segmented by a DeepLabV3Plus model with a Mobilenet backbone, for rapid execution on embedded systems. By point-pixel correspondence via the projection of the point cloud onto the image, the cloud point is segmented in turn. This makes it possible to predict the different classes of terrain that may be concatenated with the tires along the trajectory.

Data recording
Recording by Cyrille Pierre, Chadi M’Sila and Tom Bourbon